PinPoint™ AFM纳米电学模式
PinPoint™纳米机械模式在纳米机械表征中获得了高分辨率和准确性。
PinPoint™ 纳米机械模式在纳米机械表征中获得了高分辨率和准确性。它可以同时实时获取刚度、弹性模量和粘附力。当XY扫描器停止时,通过精准控制针尖和样品之间的接触力和接触时间,可以获取高速的力-距离曲线。由于可控的数据采集时间,PinPoint™ 纳米机械模式允许在各种样品表面上以高信噪比进行优化的纳米机械测量。
x
PinPoint™ 纳米机械模式在纳米机械表征中获得了高分辨率和准确性。它可以同时实时获取刚度、弹性模量和粘附力。当XY扫描器停止时,通过精准控制针尖和样品之间的接触力和接触时间,可以获取高速的力-距离曲线。由于可控的数据采集时间,PinPoint™ 纳米机械模式允许在各种样品表面上以高信噪比进行优化的纳米机械测量。
原子力显微镜(AFM)已成为研究聚合物、二维材料或活细胞等多种样品在纳米尺度上如杨氏模量和粘附力等纳米机械性质的基本工具。传统上,使用力-体积映射来测量定量的机械性质。为此,在特定数量的像素上进行孤立的力-距离测量。悬臂被压在表面上,直到达到之前设定的阈值,即设定点力。在接近和回缩过程中,悬臂的偏转都作为z高度的函数进行测量。
随后,悬臂移动到下一个像素,在那里测量另一条力-距离曲线(见图1(a))。一般来说收集单个力-距离曲线至少需要几百毫秒,当记录包含数千个像素的完整图像时,这一时间将增加到数小时。
为了克服力-体积映射耗时的限制,Park Systems开发了PinPoint纳米机械模式,该模式在保持高精度和准确性的同时,将Z扫描器的接近和回缩速度提高了十倍。与常规AFM扫描模式类似,通过可定制的通道选择,可以在高分辨率形貌图的基础上获得各种定量机械数据,以及功能性电学数据,如导电性、电容等。通过Park Systems的SmartScan™软件对力-距离曲线的自动分析,可以在扫描过程中实现纳米机械数据的实时可视化。
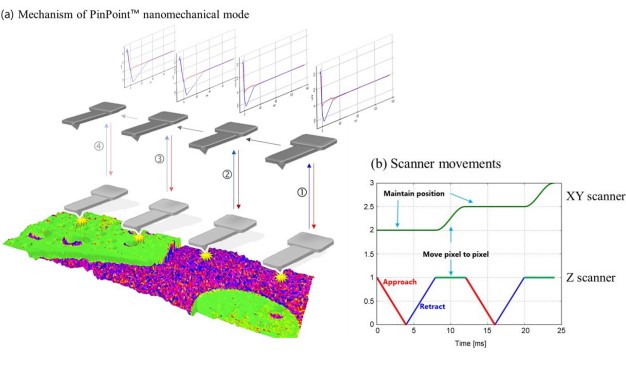
图1. (a) Park Systems的PinPoint纳米机械模式的示意图:在每个像素上,针尖接近样品并回缩,然后再移动到下一个像素。由此产生的力曲线及其自动分析允许实时可视化纳米机械性质。(b) PinPoint纳米机械模式扫描期间XY和Z扫描器的位置。
如图1(b)所示,解耦的XY和Z扫描器在PinPoint纳米机械测量期间实现了精准的运动,同时较大程度地减少了横向和水平运动之间的串扰。因此,与传统的接触模式相比,PinPoint纳米机械模式消除了横向剪切力,这大大降低了针尖或表面的损伤,同时建立了明确的物理接触,使得能够进行精准的纳米机械测量。因此,用户可以同时成像表面形貌图以及机械性质,如模量、变形、粘附、能量耗散和刚度。表1(下一页)总结了使用PinPoint纳米机械模式可以记录的所有可选通道。
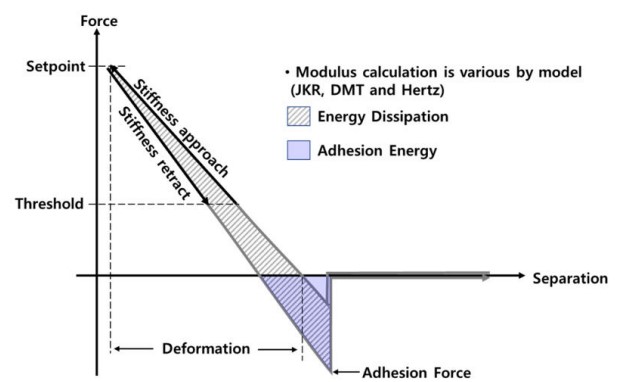
图2. 从力-分离曲线中得出的机械性质:刚度由样品压痕确定,粘附力和能量由回缩曲线计算,而能量耗散由接近和回缩之间的滞后给出。
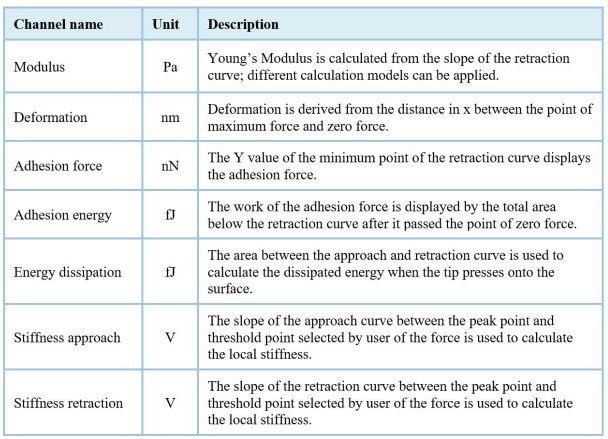
表1. PinPoint™纳米机械模式的通道信息。
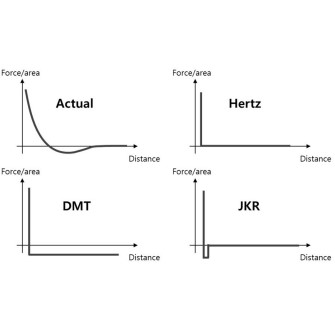
图3. SmartScan软件中提供的三种模量模型与实际的力-距离曲线的比较。
Korayem, M. & Rastegar, Zahra & Taheri, Marzie.(2012). 生物细胞操纵中纳米接触力学模型的灵敏度分析。纳米科学与纳米技术。2. 49-56. 10.5923/j.nn.20120203.02.
赫兹模型(非粘附弹性接触):无粘附的弹性变形。DMT模型(粘附弹性接触):回缩时带有粘附的弹性变形。JKR模型(粘附弹性接触):回缩时带有粘附的弹性变形。
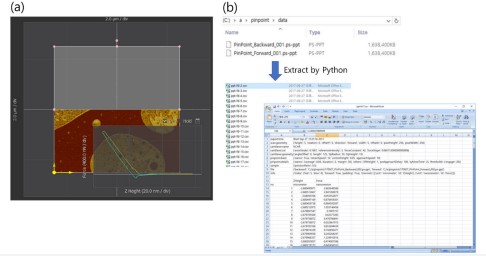
图4. (a) 扫描区域上的实时FD曲线 (b) 用于后期分析的FD曲线提取。
为了内部自动计算杨氏模量,Park Systems提供了如图3所示的三种可选的接触力学模型。根据样品的弹性和粘附性,赫兹模型、JKR模型或DMT模型将产生准确的结果。与接触力表现出较少粘附和变形的硬样品适合使用赫兹模型。对于具有显著表面粘附的硬样品(模量超过1 GPa),建议使用DMT模型。对于具有高表面粘附的软样品,推荐使用JKR模型。由于PinPoint™纳米机械模式允许用户如图4(a)所示实时监测力-距离曲线,因此可以根据实验要求和相应的力-距离曲线形状在成像过程中优化接触力学模型的选择。对于PinPoint纳米机械模式下获得的力-距离曲线的进一步分析,整个数据集可以单独保存。图4(b)显示了使用Python软件进行曲线提取的示例。
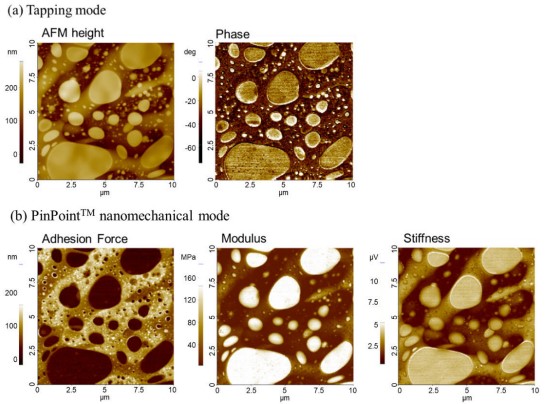
图5: (a) 轻敲模式下的相位成像和(b) 在同一测量区域聚苯乙烯-聚丁二烯嵌段共聚物(PS-PB)的PinPoint™纳米力学模式结果。
为了获得定量的纳米力学数据,在测量之前,需要对每个悬臂的灵敏度和弹簧常数进行校准。可靠的灵敏度校准需要不会变形的硬质参考样品(如蓝宝石)。此外,还需要考虑悬臂的力常数(见应用注释#44:“适当的原子力显微镜悬臂选择取决于样品性质”)。为了进行定量的模量计算,悬臂针尖必须在不施加过高加载力的情况下使样品产生足够的变形,同时保持较高的力灵敏度。因此,悬臂的力常数需要与样品的刚度相匹配。通常,Park Systems推荐对硬样品使用硬悬臂,对软样品使用软悬臂,如表2所述。
在标准轻敲模式下的相位通道中,也可以观察到机械性能的定性差异。然而,相位成像既无法区分局部刚度和粘附力之间的差异,也无法提供定量的模量数据。为了说明PinPoint与相位成像相比的能力,图5展示了聚苯乙烯和聚丁二烯的同一种聚合物共混物的两组数据:第一组数据是通过相位成像收集的(图5(a)),第二组数据是在PinPoint纳米力学模式下收集的(图5(b))。相位对比度主要解析了材料的分布,而PinPoint则提供了关于粘附力、模量和刚度的定量数据。
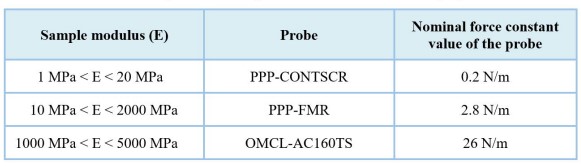
表2. 针对不同性能的样品推荐原子力显微镜探针。