接触模式是原子力显微镜(AFM)的标准测量模式,可以获取各种样品类型的形貌信息。
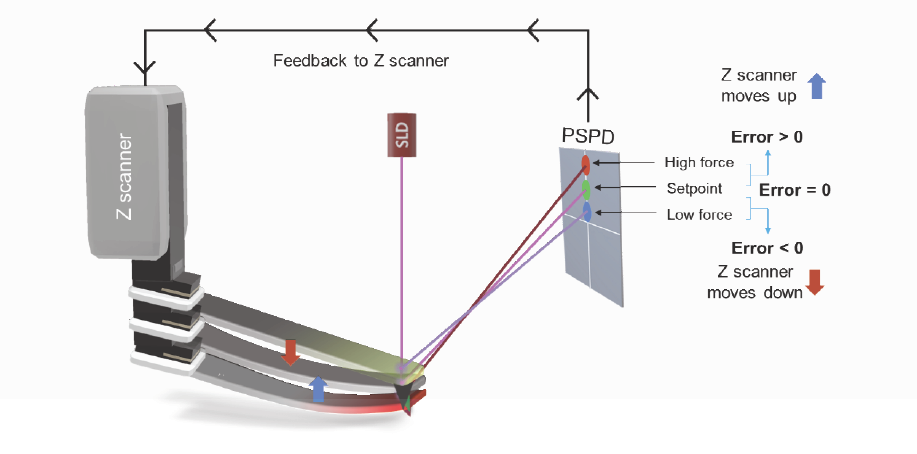
接触模式是原子力显微镜(AFM)的标准测量模式,可以获取各种样品类型的形貌信息。接触模式通常使用悬臂弯曲作为反馈,其弹簧常数相对较低,以避免样品损坏。在接触模式成像过程中,扫描器在样品表面上跟踪探针时,探针与样品之间的斥力接触力使悬臂弯曲以适应形貌变化(见图1(a))。更多详情,请参考图1(b)中的Lennard-Jones势曲线,该曲线代表了探针-样品相互作用的距离依赖性。当探针和样品的最外层原子逐渐接近时,它们开始微弱地相互吸引。这种吸引力会增加,直到原子间距离足够小,触发它们电子云之间的Pauli排斥。随着原子间距离继续减小,强烈的排斥力迅速抵消吸引力。当原子间距离缩小到几个埃(约化学键长度)时,原子间力达到平衡。
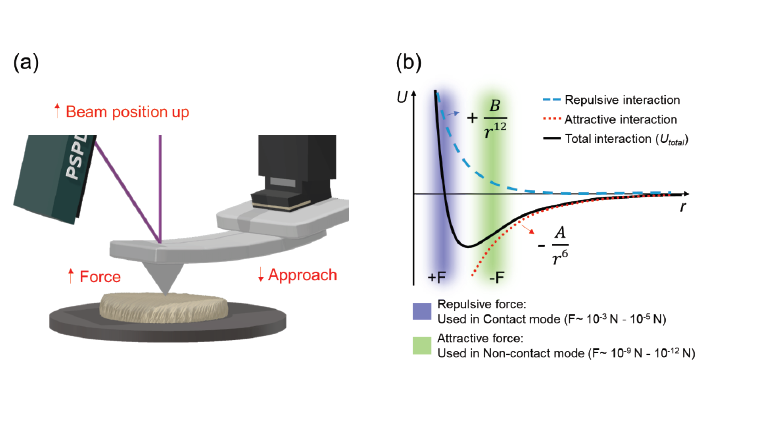
图1.(a)由于斥力接触力导致的悬臂弯曲,以及(b)原子间相互作用势U与距离r的关系。蓝色曲线表示纯斥力相互作用,红色曲线表示纯吸引相互作用,黑色曲线是长程吸引和短程斥力相互作用的组合,称为Lennard-Jones势。在较大距离上,净力是吸引力(-F),当两个原子靠近时切换为净斥力(+F)。