原子力显微镜的终极分辨率
在原子力显微镜 (AFM) 中成像表面时,带有纳米尖锐探针的悬臂扫描表面。根据成像模式,探针样品相互作用力会引起悬臂的静态偏转,或者在动态 AFM 模式下改变悬臂振动的频率、振幅或相位。接触模式和敲击模式 AFM 在排斥探针样品力域中工作,其中探针与表面接触或间歇接触。这可能导致探针磨损和样品损坏。而在 Park 的真正非接触模式下,探针在靠近表面的吸引力域中振荡,没有探针样品接触,从而实现非侵入性和高度准确的形貌成像。真正非接触模模式在亚纳米尺度上实现了探针样品距离控制,同时保持了探针和样品的完整性。这得益于 Park 的解耦 Z 和 XY 扫描器的快速响应,允许精准跟踪悬臂振动。快速的 Z 反馈使得当探针遇到形貌特征时悬臂能够迅速缩回,并保持探针样品相互作用在吸引力域内。
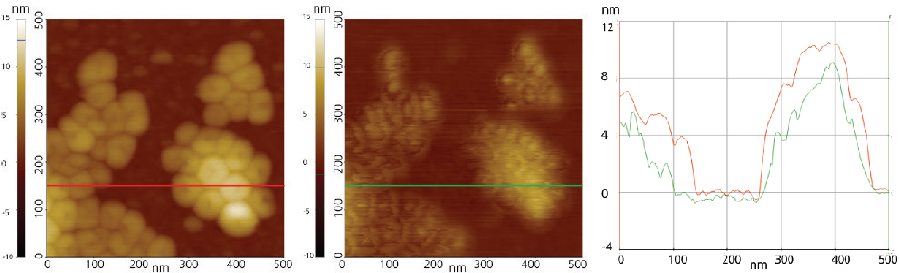
(a) F14H20的非接触模式高度图像 (b) F14H20的轻敲模式高度图像 (c) 线剖面比较
通过避免探针磨损,真正非接触模式为环境 AFM 提供了高分辨率,远远超越了接触模式和轻敲模式的能力。此外,由于其非侵入性,,真正非接触模式可以在不损坏样品的情况下成像软样品(如生物样品和软聚合物),如图1(a)所示,这在使用接触模式或轻敲模式时常见,见图1(b)。
真正非接触模式是一种动态 AFM 技术,其中悬臂在其共振频率下振荡,靠近样品表面。探针样品距离在 Lennard-Jones 势中处于非接触域,约为几十到几百埃,用于探针样品相互作用。在小于 10 nm 的小探针样品距离下,两种主要的原子间力作用在探针和样品之间:短程排斥力和长程吸引力。排斥相互作用力 (Frep) 是 Pauli 排斥原理的直接结果,该原理禁止电子云重叠,而吸引相互作用力,即范德华力 (FvdW),来源于探针和样品原子之间的偶极子相互作用。当探针和样品之间的距离减小时,短程排斥力主导相互作用,力梯度的大小显著增加。因此,像接触模式或轻敲模式这样在小探针样品距离下接触或间歇接触的技术,基于这种短程排斥力测量形貌,以牺牲探针和样品的完整性为代价。然而,当探针和样品之间的距离增加时,吸引的范德华力开始主导相互作用。Park 的真正非接触模式基于这种吸引原子间力测量表面形貌,从而防止探针或样品损坏。
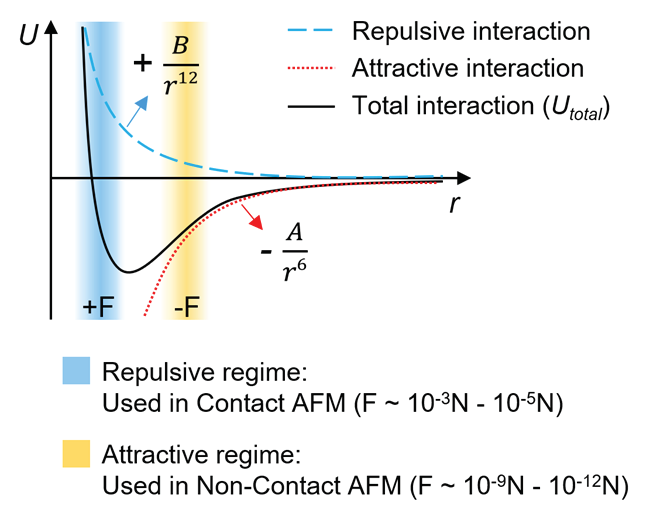
图2展示了原子间相互作用势U与距离r的关系,用以描述探针-样品的相互作用。蓝色曲线代表纯斥力作用,红色曲线代表纯吸引力作用,黑色曲线则是长程吸引力和短程斥力的组合,即Lennard-Jones势。在较大距离时,净力为吸引力(-F),但当两个原子靠近时,净力会转变为斥力(+F)。
在真正非接触模式中,悬臂以其固有的共振频率f0驱动。悬臂的共振频率由其固有弹簧常数(k0)和质量(m)决定,如方程(1)所示。当悬臂靠近样品表面时,由于针尖顶点和样品表面之间的吸引范德华力,共振频率会发生变化,这是由于弹簧常数从初始固有值k0变为有效弹簧常数(keff)的变化引起的,如方程所示。
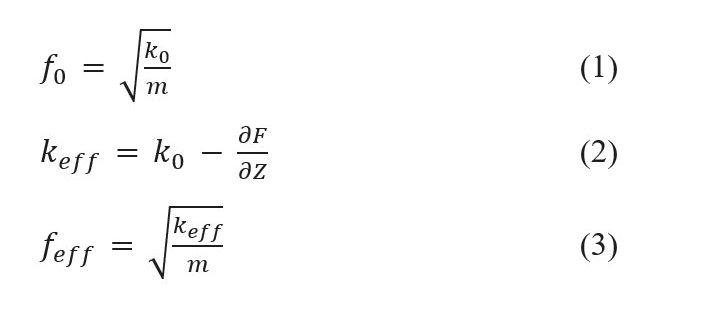
在较大针尖-样品距离的吸引范德华力区域内,由于力梯度F'(=∂F/∂z)为正,keff小于k0。为了检测有效弹簧常数和共振频率的变化,True Non-contact mode监测悬臂振荡的振幅。振幅变化的检测对针尖-样品距离的变化(∆d)更为敏感,而不是静态悬臂偏转的变化,这种特性在Tapping模式、电静力显微镜(EFM)和磁力显微镜(MFM)中得到应用。
为引入悬臂的机械振荡,使用具有广泛频率范围的压电元件驱动悬臂。通过在驱动压电的频率范围内进行扫描,可以确认悬臂的共振频率f0,并显示了图3中的共振频率与驱动频率的关系,无相互作用力下的情况(a)和用于Park真正非接触模式的吸引力力区域(b)。
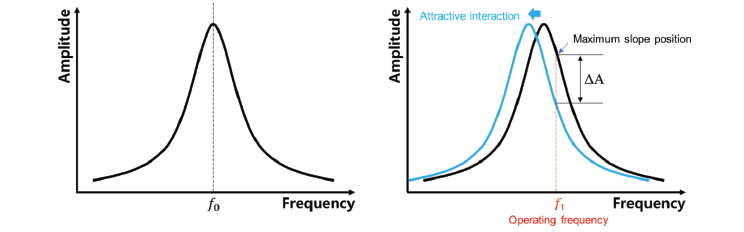
图3展示了悬臂共振的原理图(a)和用于Park真正非接触模式的吸引力力区域(b),导致频率向低频偏移为蓝色。在操作频率f1下测量到的振荡幅度变化∆A如图中所示。
在True Non-contact mode中,操作或驱动频率f1略高于f0,见图3(b)。正如方程(2)和(3)所示,由于吸引力,keff相对于k0减小,导致共振频率向低频偏移,并且在f1处测量到的振荡幅度变化∆A为负值。在f1处,曲线的斜率达到最大值,即使共振微小变化也能产生大的振幅变化∆A。因此,测量在f1处的振幅变化对针尖-样品距离的变化(∆d)较为敏感。由于样品形貌的变化会引起针尖-样品距离∆d和相互作用力的变化,振幅变化∆A可以检测样品的形貌特征。因此,True Non-contact mode使用在操作频率f1处测量的振幅作为反馈信号。
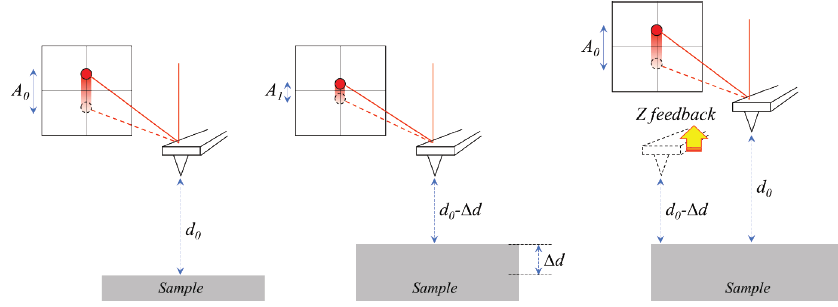
图4显示了悬臂振幅与针尖-样品距离依赖关系和Z反馈。
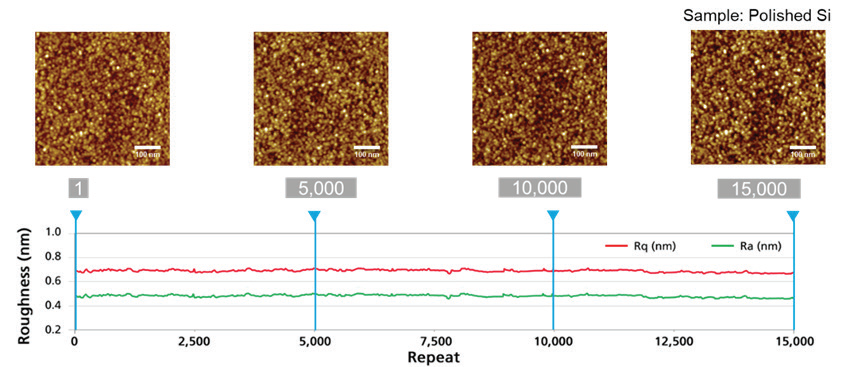
图5展示了长期非接触模式下的重复测量,没有针尖损伤。在抛光的硅基板上进行了15,000次重复测量,扫描速率为3赫兹。
反馈控制Z扫描器在成像过程中的运动,以补偿振幅与预设设定点(用于反馈的参考振幅)之间的偏差,从而调整针尖与样品之间的距离变化,如图4所示。通过保持恒定的振幅和距离,真正非接触模式通过Z扫描器的运动重建样品的形貌特征。由于吸引力力区域(图2)相对较窄,Z反馈需要足够快速以对形貌变化做出反应,以避免针尖-样品接触。
通常在长期的接触或轻敲模式测量中,随着扫描的进行,针尖顶点会发生磨损。针尖磨损会增加针尖半径,从而降低空间分辨率和表面粗糙度测量的准确性。图5显示了使用相同悬臂进行的15,000次扫描中的四幅真正非接触模式图像,以及随扫描次数变化的表面粗糙度对应曲线。与其他原子力显微镜形貌模式不同,真正非接触模式在整个测量系列中保持了空间分辨率和表面粗糙度的稳定。Park 真正非接触模式的重复性和精度归功于高度精准的反馈系统和Z扫描器的稳定性,使其能够连续进行72小时的非接触成像,而无需调整扫描参数。